losserv is a line-of-sight/viewshed server. It is part of vhclmaps, a C++ framework for map viewers and servers.
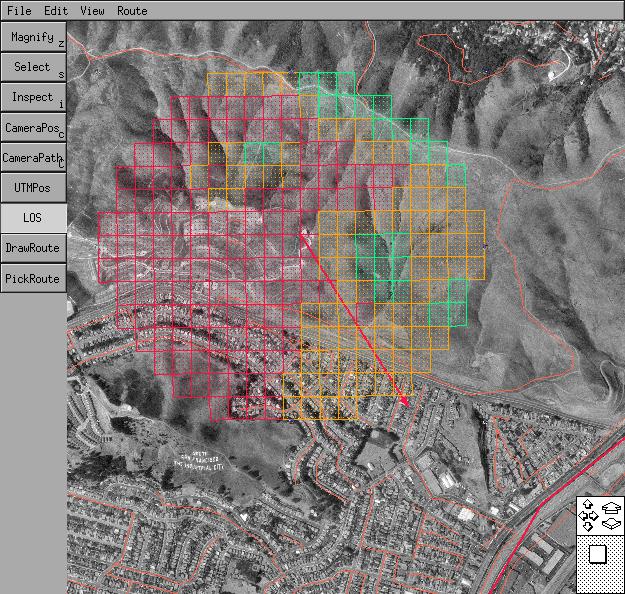
losserv uses digital elevation data to compute areas of visibility and nonvisibility with respect to an observer's position. This service is integrated with utmviewer: the LOS tool is used to draw a line defining a radius around an observer and issue a viewshed command to losserv; the result sent back to the viewer. The areas are color-coded so that red means visible, orange means probably visible and green means invisible.
Here are screendumps of viewsheds
created by losserv,
displayed in utmviewer:
gif or
jpg
{kind=link}
{kind=link}